本日は MetaQuestPro の技術調査枠です。
MetaQuestProでMRTKを使って物理空間のシーンモデルを利用して床や壁または種別を判定する手順を記事にします。
前提条件
前回記事の続きです。
bluebirdofoz.hatenablog.com
セマンティック分類
OVRSceneManager はシーンモデルの読み込みにより配置されたオブジェクトにその種類を区別するための OVRSemanticClassification コンポーネントを追加します。
これは以下のラベルをサポートしています。
・FLOOR:床
・CEILING:天井
・WALL_FACE:壁
・DESK:机
・COUCH:ソファ
・DOOR_FRAME:ドア
・WINDOW_FRAME:窓
・OTHER:そのほか
サンプルシーンを作成する
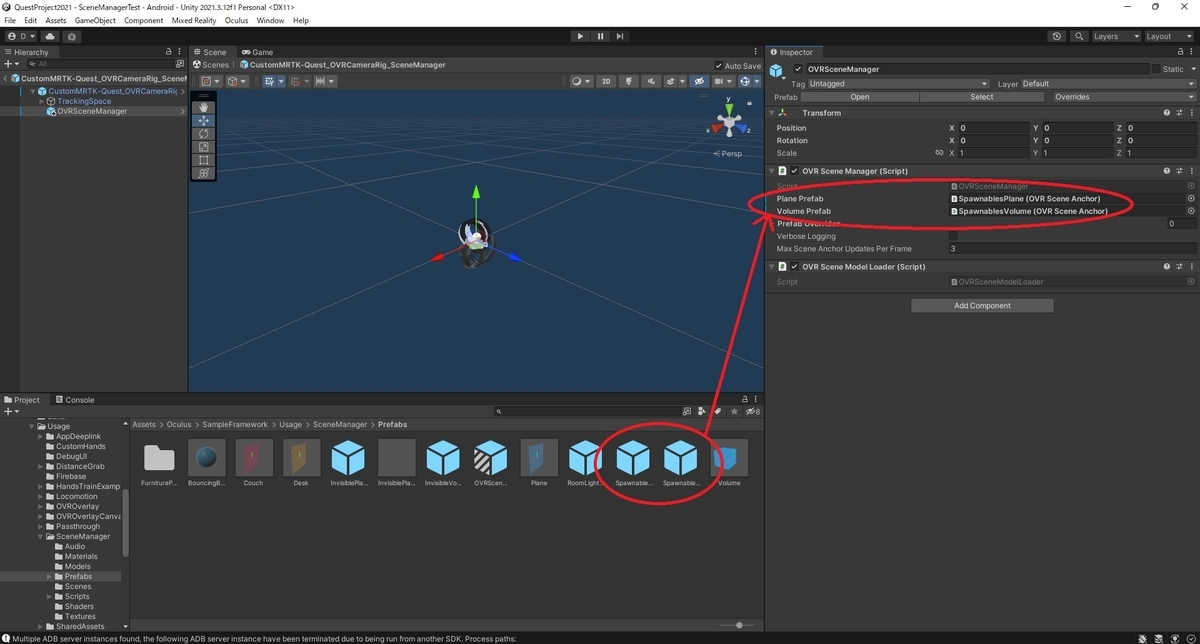
本機能は前回記事の OVRSceneManager コンポーネントの設定を以下の通り変更することで体験することができます。
・[Plane Prefab]に Assets/Oculus/SampleFramework/Usage/Scenemanager/Prefabs/SpawnablesPlane.prefab を設定する
・[Volume Prefab]に Assets/Oculus/SampleFramework/Usage/Scenemanager/Prefabs/SpawnablesVolume.prefab を設定する
ビルドと動作確認
これで設定は完了です。
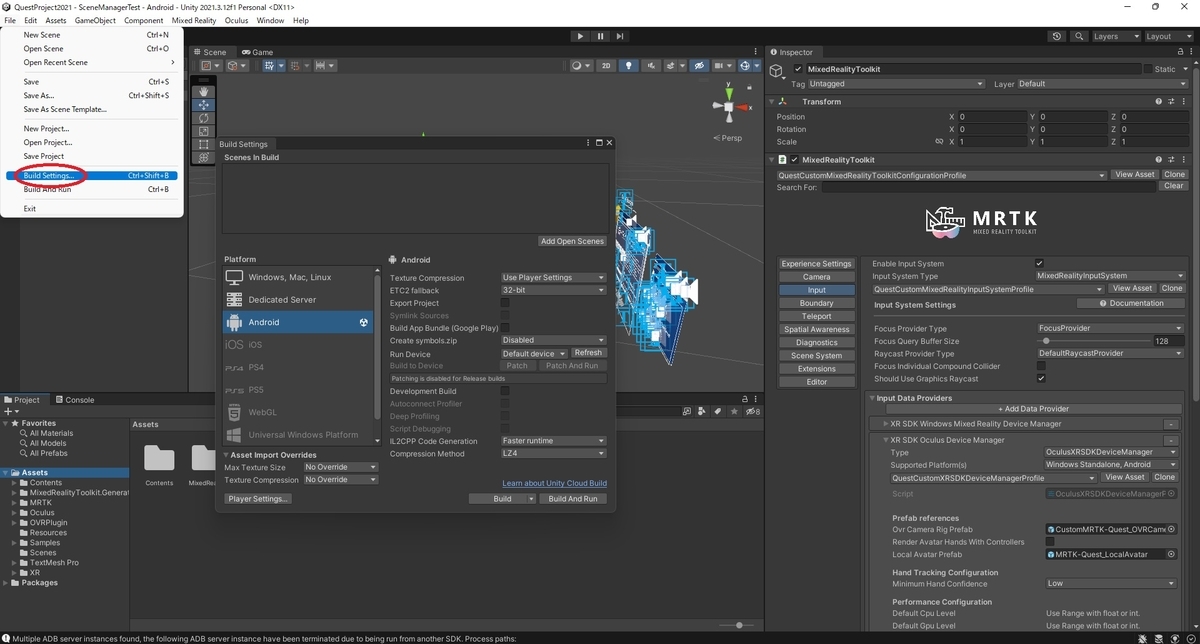
[File -> BuildSettings...]からビルドとデプロイを実行します。
自作アプリのデプロイと実行に関する手順は以下の記事を参照ください。
bluebirdofoz.hatenablog.com
MetaQuestPro でデプロイしたアプリを起動します。
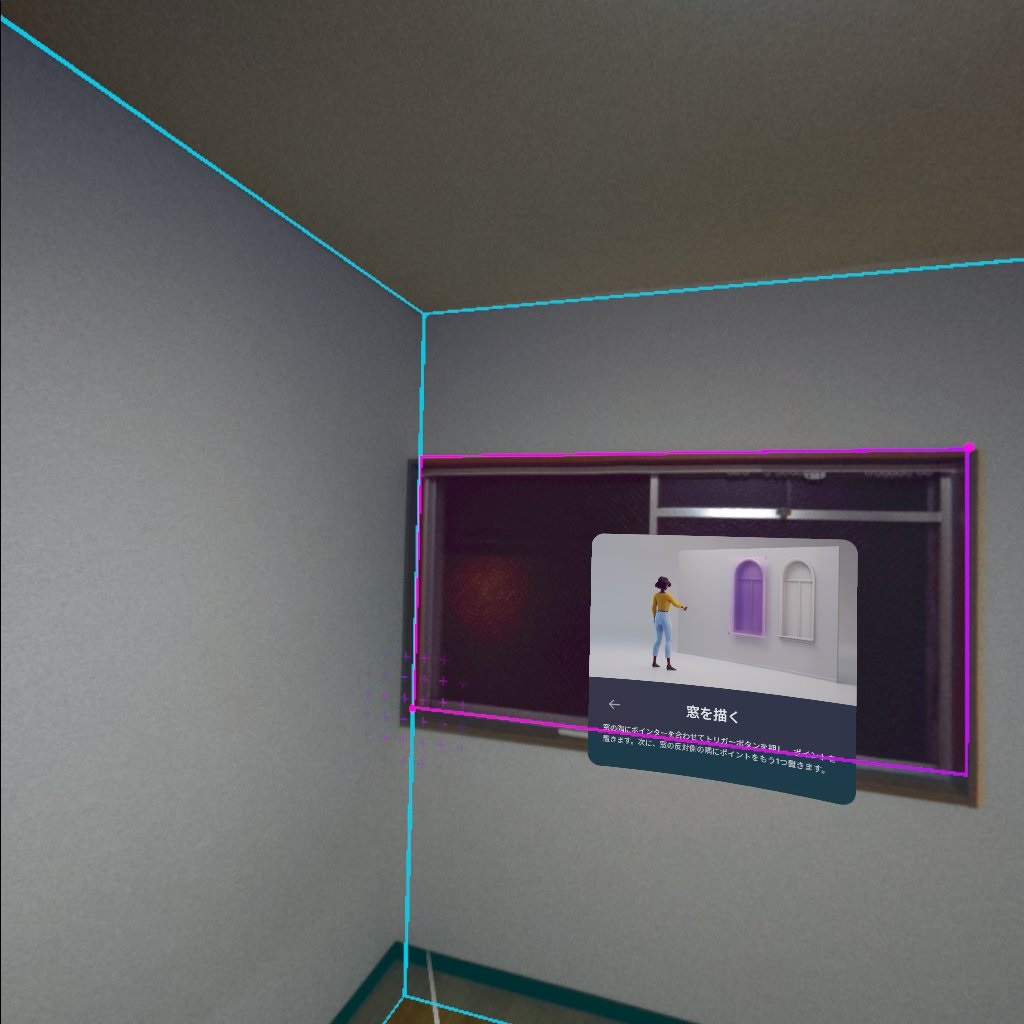
ルーム設定の作業で今度は窓枠も設定してみます。
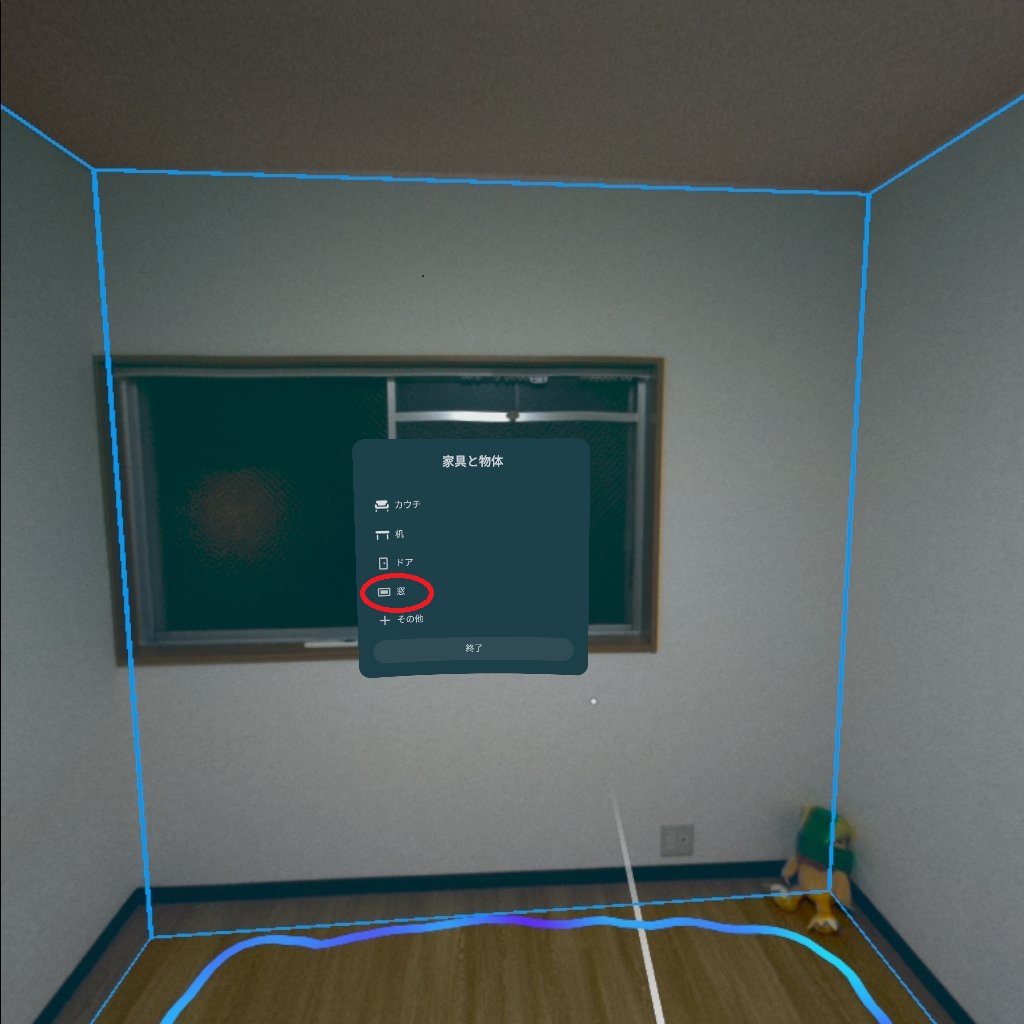
案内に従い、窓の輪郭を設定します。
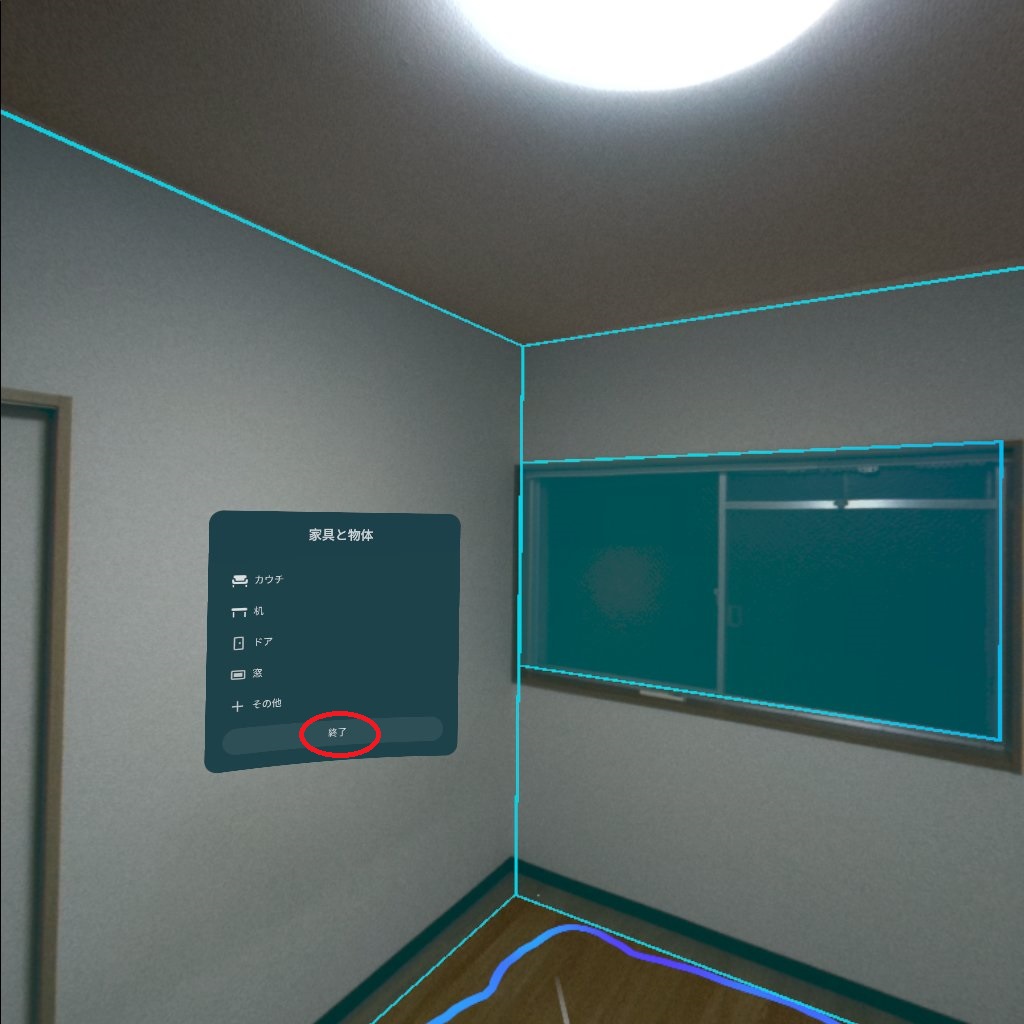
識別したいオブジェクトを全て設定したら[終了]を選択します。
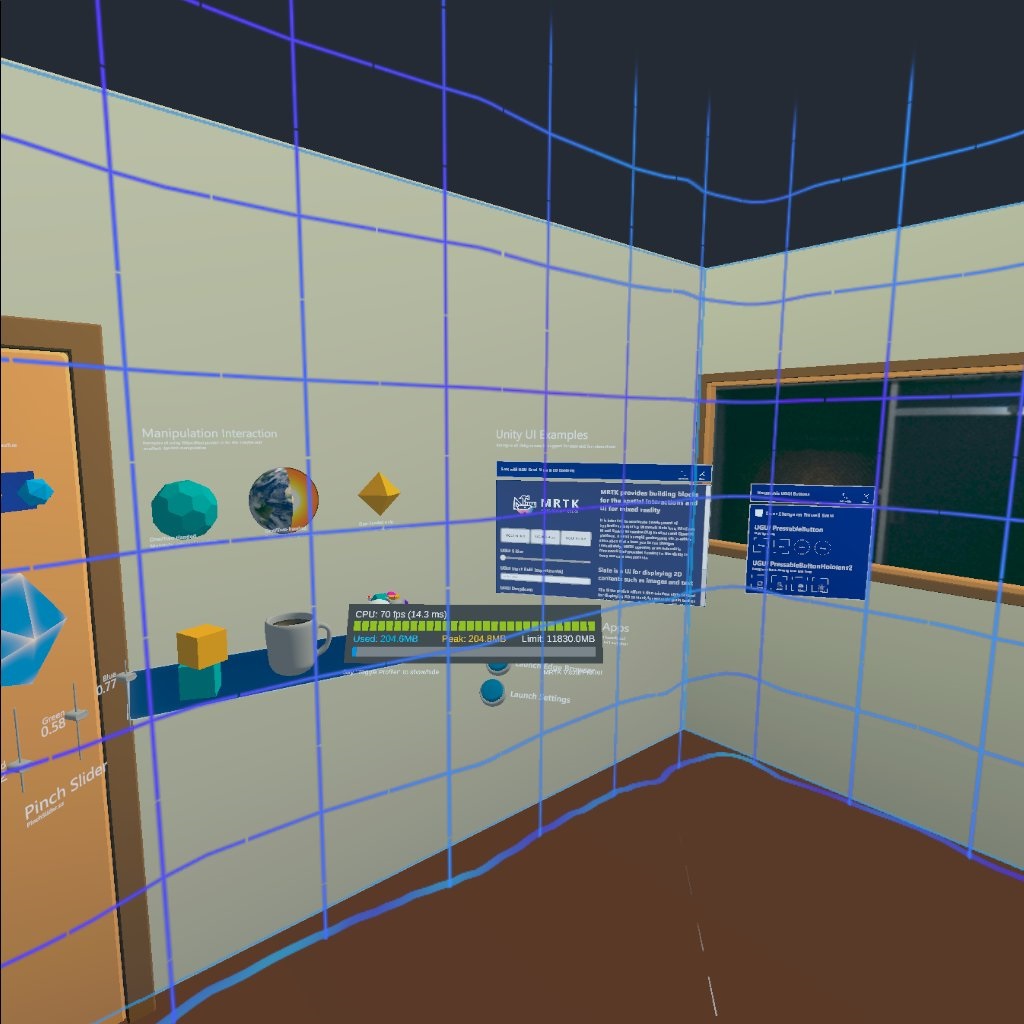
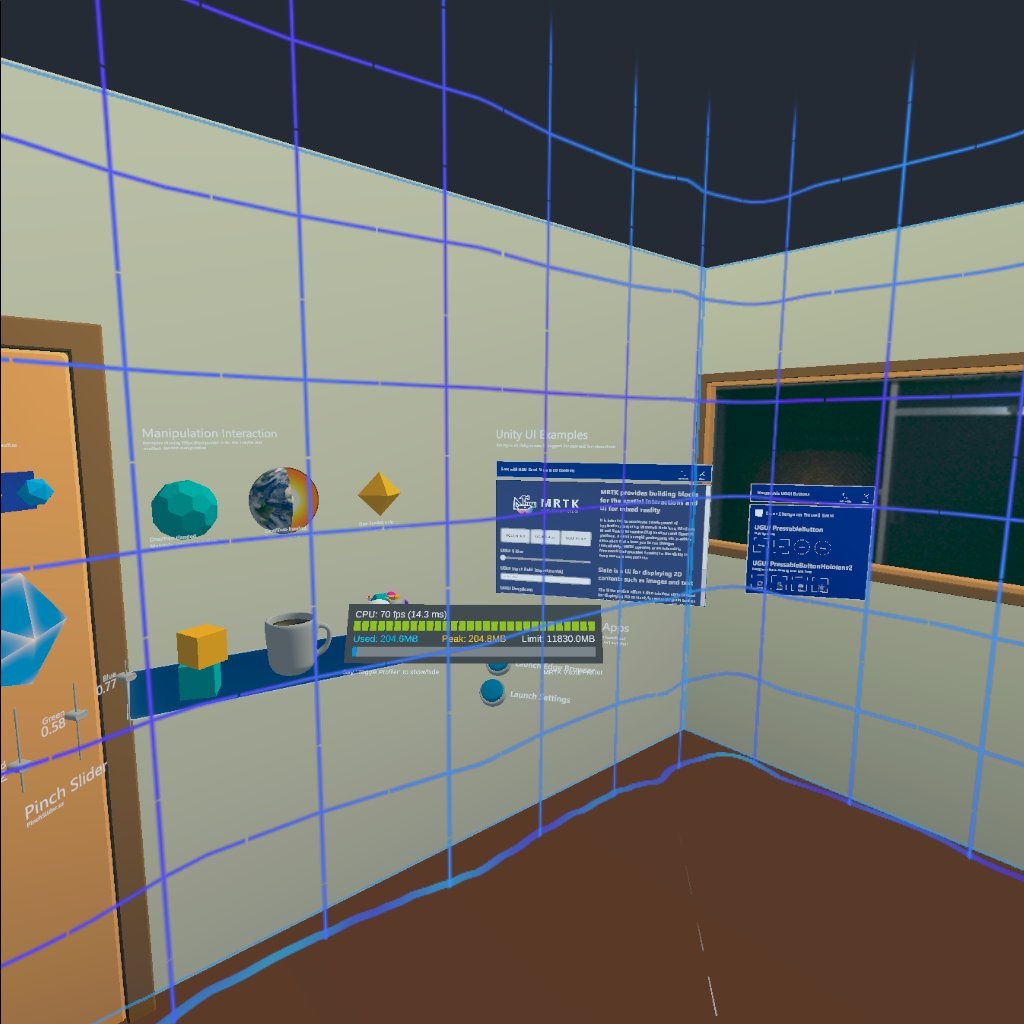
アプリが起動すると以下の通り、種別に応じて適切な見た目のオブジェクトが設定されます。